







1990년대 말 이솝(EASOP)이란 로봇이 실험적으로 개발되어 로봇수술에 대한 관심을 모았으며, 이후 제우스(ZEUS)와 다빈치(da Vinci)가 개발되었습니다.
다빈치 로봇은 여러 가지 면에서 다른 로봇에 비해 임상에 적용하기 좋게 설계되어 2001년 유일하게 미국 FDA의 승인을 받아서 판매가 가능하게 되었습니다.
이후, 국내에서는 2004년 동아대학교병원 비뇨기과 수술팀이 처음으로 싱가폴에서 국내환자에게 로봇수술을 시행함으로써 국내에서도 로봇수술 시대의 서막이 올랐습니다.
현재는 다빈치 로봇을 이용한 다양한 수술이 국내에서도 활발히 시행되고 있습니다.
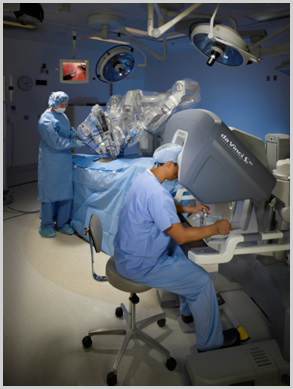
다빈치 로봇수술은 3차원 입체영상을 통해 10~15배까지 확대된 영상을 제공하며, 손보다 정교한 움직임으로 수술의 성공률을 높여줍니다.
지금까지 여러 국가와 회사에서 수술 로봇을 개발하고 있으나, 아직까지 다빈치 로봇은 전세계에서 유일한 수술 로봇입니다.


이솝은 1994년에 개발되어 복강경수술에서 복강경카메라를 고정해 주고 상하 및 좌우, 원근을 발판이나 손잡이를 눌러 조절할 수 있으며 최근에는 수술자의 목소리를 인식하여 동작이 되는 장치로까지 개발되었습니다. 복강경 시술 시 보조의사의 역할을 대신하며 단순히 1개의 로봇 팔에 카메라를 연결한 후 카메라의 위치를 시술자의 명령에 따라 좌우 혹은 상하의 조절을 합니다.
이는 시술자와 보조의사간의 잘못된 의사전달로 인한 수술 시간의 지연이나 보조의사의 피로도에 따른 사고 위험성을 줄이는데 커다란 도움이 됩니다.


제우스는 이솝을 개발한 회사에서 발전된 수술용 로봇으로 개발하였습니다. 이는 시술자의 양손을 로봇이 대신하여 수술 기구를 잡아주고 의사의 시술 동작을 로봇이 따라 하도록 개발하여 최초의 수술용 로봇으로 중요한 의미를 가지게 되었습니다.
하지만 제우스의 경우 단순히 복강경 기구를 잡아 주는 역할만 가능하였고 입체적 영상 전달이 불가능하고 이후에 개발된 다빈치 로봇에 비해 손처럼 자유자재로 움직일 수 있는 능력이 없어 단지 원격 수술의 가능성만을 제시한 체 실제 의료에 큰 역할을 하지 못하고 제품의 생산과 사용이 중단되었습니다.

초기의 제우스는 기존의 복강경의 기구들을 시술자 대신 잡아 주는 역할을 한 반면 다빈치는 몸 안에 직접 삽입되는 로봇으로 시술자의 손처럼 움직여 마치 환부를 열고 시술자가 직접 시술하는 것과 같이 수술하는 로봇입니다.
이는 시술자에게 좌우 반전 없이 10~15배의 확대된 입체영상을 전달하고 시술자의 움직임을 정교하게 5mm~8mm의 작은 로봇 팔에 전달함으로써 기존의 매우 어렵거나 불가능하였던 시술을 가능하게 하였습니다. 다빈치의 사용은 미국과 유럽 및 아시아의 거의 모든 우수 대학 병원과 수련 병원에 사용하고 있을 정도로 이미 보편화되어 있습니다.
49201 부산광역시 서구 대신공원로 26 | 대표전화 : (051)240-2000
Copyrightⓒ2017 DONG-A UNIVERSITY HOSPITAL. ALL Right Reserved